|
[Anglais]
[FranÁais]
<< Prev
[1]
[2]
Next >>
 |
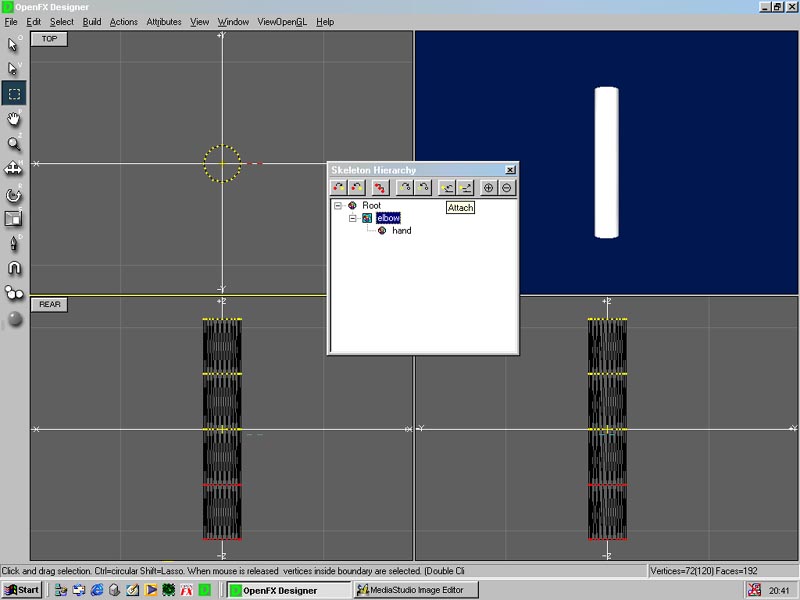
6Ťme ťtape
Avec les jointures faient et en place, on peut attacher les jointures sťparťes
aux vertices nťcessaires. Fermez le menu de construction des jointures et ouvrez
celui de la "Hierarchy Joints". Sťlťctionnez la jointure coude dans la fenÍtre
hierarchy. Dans la fenÍtre du mesh, sťlťctionnez les 3 vertices du haut avec
l'outil de sťlťction ŗ la volťe. Retournez dans le menu hierarchy et appuyez sur
attach. Ceci va assigner les verices sťlťctionnťes ŗ la jointure coude. Vous pouvez
ŗ prťsent dťsťlťctionner ces vertices en appuyant sur deselect.
|
 |
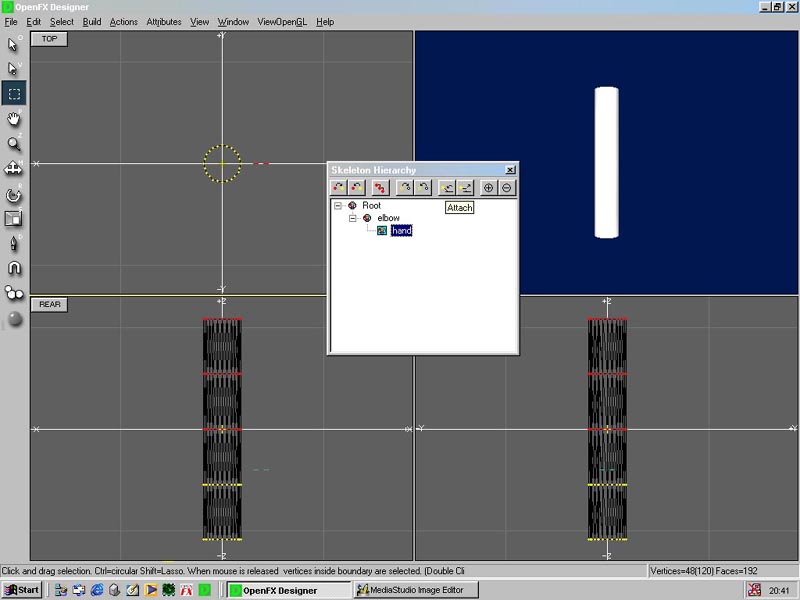
7Ťme ťtape
Faite la mÍme chose pour la kointure main mais cette fois sťlťctionnez les 2 rangťes
de vertices (voir image).
Sauvez votre bras et passez dans l'animator.
|
 |
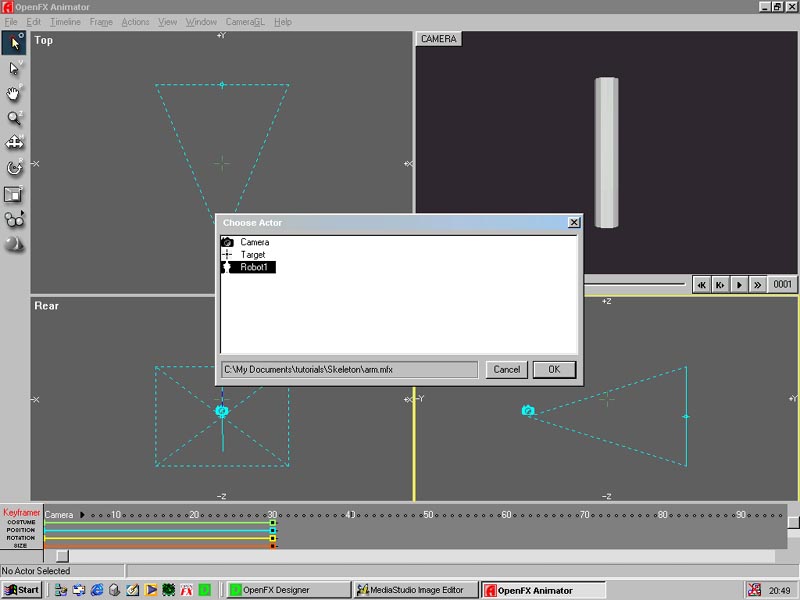
8Ťme ťtape
Fixez la longueur de l'animation ŗ 30 frames et chargez le nouvel objet en tant que robot.
|
 |
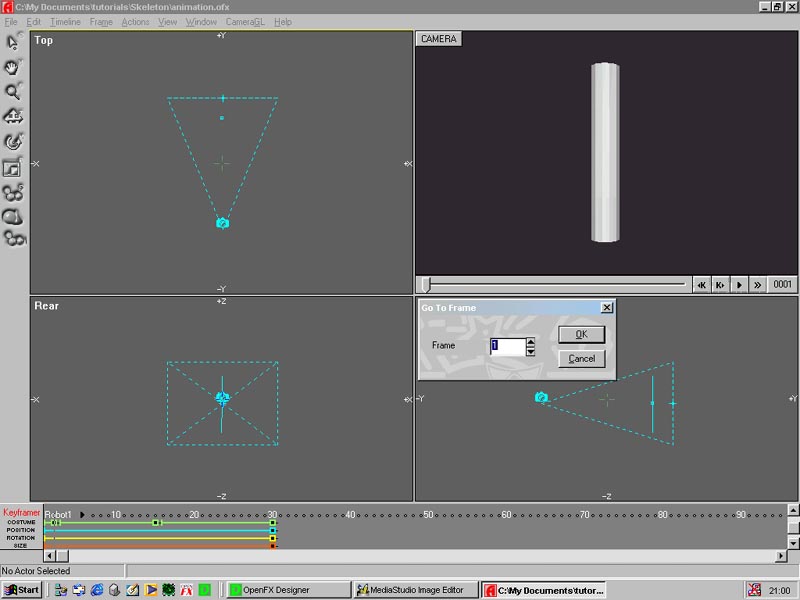
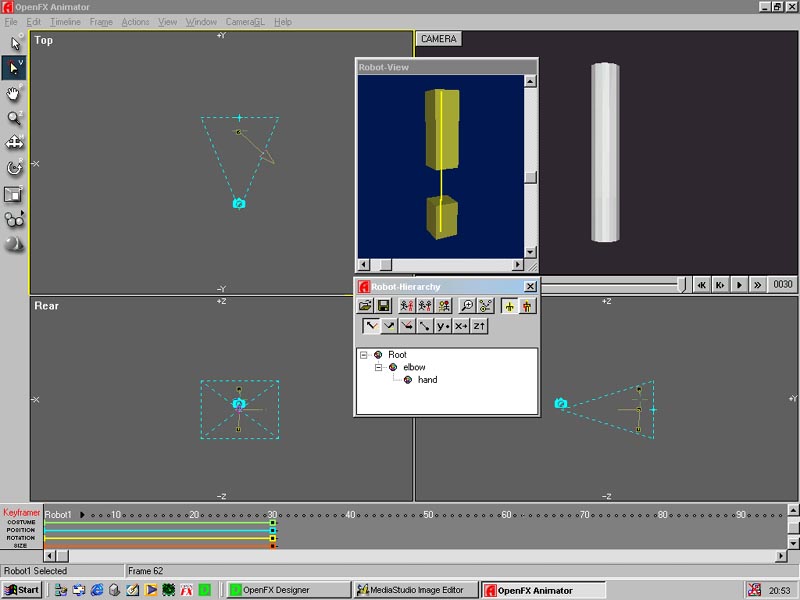
9Ťme ťtape
Avec le robot chargť, insťrez une key frame dans le robot costume timeline ŗ la frame
15. Assurez vous que la fenÍtre keyframer est ouverte afin que vous puissiez voire la
time line (appuyez su "k" pour ouvrir le keyframer). Dans la vue camťra appuyez sur le
bouton Go To Frame et entrez 15. Ceci est la nouvelle key frame pour votre bras qui est
requise avant que vous puissiez modifier le mesh avec le squelette.
|
 |
10Ťme ťtape
Sťlťctionnez l'acteur robot en appuyant sur la touche "a" et en cliquant sur robot1.
Appuyeez sur "v", ceci va faire apparaÓtre la vue robot. Dans la fenÍtre robot hierarchy,
sťlťctionnez la jointure main et faite la tourner autour de l'axe Y, dans n'importe
quelle vue cela va crťer un keyframe pose pour votre objet.
Pour crťer l'effect d'un objet se courbant insťrez une key frame ŗ 2 sans repositionner
les jointures et rťpťtez les ťtapes 9-10.
Les fichiers de l'exemple sont iÁi.
|
Tutoriel ťcrit par Andrew Heyworth
Tutoriel traduit par Jean-luc Songa Butera
<< Prev
[1]
[2]
Next >>
|